Германски научници направија ново достигнување во областа на роботиката, бидејќи куче робот со виртуелен ‘рбетен мозок успеа да научи да оди за само половина час, објавија германските медиуми.
Кучето робот одеше по оригиналниот метод на сопнување пронајден кај животните. Истражувајќи го начинот на кој животните учат да одат низ процесот на сопнување, научниците дошле до идеја за експеримент кој би покажал дали робот може да го совлада одењето на ист начин како животното во природа.
Создаден е робот со четири нозе со големина на куче на кој вршеле одредени тестови, при што истовремено ја испитувале оваа појава кај животните.
Набљудувајќи го процесот на учење за одење кај животните, научниците заклучиле дека животните во голема мера се потпираат на крутите рефлекси на ‘рбетниот мозок за да ја координираат контролата на мускулите и тетивите, додека рефлексите за контрола на моторната функција им помагаат да избегнат паѓање и повреда при нивните први обиди.
Научниците во објаснувањето велат дека дизајнирале алгоритам за учење кој ќе функционира како ‘рбетниот мозок и ќе работи како она што е познато како централен генератор на шаблони (CPG). Кај луѓето и животните, CPG се мрежи на неврони во ‘рбетниот мозок кои, без никаков влез од мозокот, произведуваат периодични мускулни контракции. CPG беше симулиран на мал и лесен компјутер кој го контролираше движењето на нозете на роботот и беше поставен на роботот каде што обично стои главата на кучето.
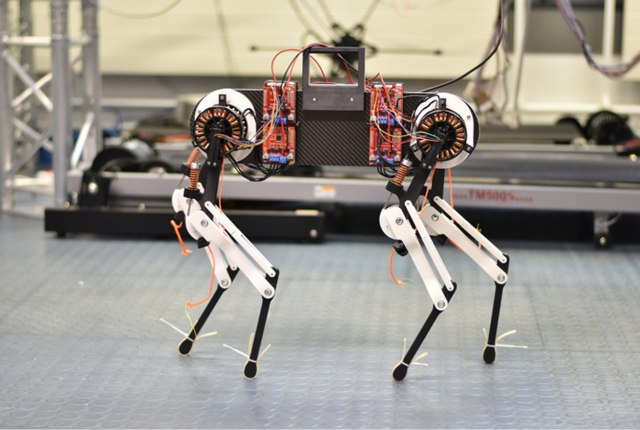
Роботот – кој истражувачите го нарекоа Морти – беше дизајниран со сензори на нозете за да ги мери информациите за неговото движење.
Морти „научил“ да оди без претходно експлицитно „знаење“ за дизајнот на нозете, моторите или пружините со континуирано споредување на очекуваните податоци (моделирани од виртуелен ‘рбетниот мозок) со податоците од сензорот додека се обидувал да оди.
Резултатот од експериментот е позитивен, во рок од еден час, Морти може да премине од тетеравење наоколу како новороденче до одење, оптимизирајќи ги неговите модели на движење побрзо од животното.





